自动驾驶技术除了是重要的汽车主动安全技术之外,还可能对交通运输业产生重大影响,因此当下科技界与风险投资界最炙手可热的技术方向之一。IT巨头如Google、Apple,汽车巨头如通用、丰田、大众,ABCD(A-Autoliv/B-Bosch/C-Continental/D-Delphi)四大Tier1,以及大量的独角兽创业公司都对其趋之若鹜地,数百亿美金砸向其中!
自动驾驶技术大致可分为三大部分:环境感知技术、决策规划技术和控制执行技术。
◆环境感知技术:包括利用机器视觉的图像识别技术,利用雷达(激光、毫米波、超声波)的周边障碍物检测技术,SLAM技术,高精度定位技术,多源信息融合技术等。
◆决策规划技术:包括行为预测技术,路径规划技术,避障技术等。
◆控制执行技术:包括面向驱动/制动的纵向动力学控制,面向转向的横向动力学控制,线控底盘技术等。
目前国内自动驾驶汽车产业发展仍处在初级阶段,技术人才缺乏,自动驾驶汽车的开发缺少系统的教育培训引导。各大公司只得在现有人才库中互相争夺(如百度、Google、Tesla、Uber等公司的自动驾驶工程师),以致工程师的价格水涨船高。
本课程将从自动驾驶汽车视觉系统、雷达系统入手,系统讲解自动驾驶汽车环境感知系统、路径规划系统开发所需的知识,并就机器视觉技术、激光雷达感知技术、高精度地图技术、路径规划技术和SLAM(Simultaneous Localization and Mapping,即时定位与地图构建)技术等重点问题进行讲解和剖析。
授课对象
◆汽车辅助驾驶系统(SAE L2/L3)、汽车主动安全技术工程师、研究人员
◆无人驾驶技术(SAE L4)工程师、研究人员,项目负责人
◆车用感知系统、 路径规划系统、SLAM软硬件研发工程师、研究人
◆对自动驾驶技术感兴趣的投资经理、行研人员,企业决策人员
课程收益
◆全面、系统地讲解自动驾驶感知系统、车用高精度地图、路径规划、SLAM的理论知识
◆指导自动驾驶感知系统的开发设计,针对自动驾驶具体场景及其所需功能提供算法实战辅导
◆与同济大学智能汽车研究所进一步深入合作的机会。
讲师简介
张 博士,同济大学软件学院,副教授
他曾于2003年和2006年在上海交通大学计算机科学与技术系分别获得学士和硕士学位。之后曾先后供职于Microsoft和Autodesk公司。2008年3月至香港理工大学攻读博士学位,2011年8月加入同济大学。主要研究兴趣包括机器视觉与图像理解、智能驾驶中的环境感知、生物特征识别、多媒体质量评价等。他以第一作者身份已在IEEE T-PAMI、IEEE T-IP、IEEE T-MM、Pattern Recognition、Image and Vision Computing等期刊上发表论文18篇。根据Google Scholar统计,截至目前,其所发表论文总的被引用次数为4392次;其中,3篇论文入选ESI Highly Cited Papers。其论文“FSIM: A feature similarity index for image quality assessment, IEEE Trans. Image Processing, 20 (8) 2378-2386, 2011”为IEEE TIP自2011年以来所有发表论文中被引用次数最高的论文,目前被引用1824次。其论文“Online finger-knuckle-print verification for personal authentication, Pattern Recognition, 43 (7) 2560-2571, 2010”曾获Pattern Recognition杂志最佳论文提名。其论文“3D ear identification using LC-KSVD and local histograms of surface types”获得ICME2015最佳论文提名。他于2013年入选上海市浦江人才计划。他目前是IEEE高级会员、中国计算机学会(CCF)高级会员、中国计算机学会(CCF)计算机视觉专业委员会委员、中国图像图形学学会机器视觉专业委员会委员、视觉与学习青年研讨会(VALSE)在线组委会委员。在具体技术与理论方面的主要贡献包括:1)提出了全参考图像质量评价模型FSIM和VSI;2)提出了基于自然场景统计模型特征的无参考图像质量评价模型IL-NIQE;3)提出了面向生物特征识别问题的图像快速分类算法;4)系统研究了非接触式掌纹识别技术,设计制造了原型样机并建立了大规模公开数据集;5)提出了基于机器学习理论的泊车位检测与定位算法,并建立了标准数据集。获得5项授权国家发明专利。
赵 博士,同济大学电信学院/同济大学智能汽车研究所,助理教授
现为同济大学电子信息与工程学院计算机科学与技术系助理教授。2006年获得东南大学地理信息工程系学士学位,同年进入测绘遥感信息工程国家重点实验室攻读硕士学位,并获得硕博连读资格,2011年获得武汉大学摄影测量与遥感专业博士学位。期间曾得到中德合作项目“三维城市信息解译”资助先后前往德国慕尼黑工业大学和汉诺威大学(Leibniz Universität Hannover)进行学术访问。2012年7月至2013年12月前往荷兰代尔夫特理工大学(Technische Universiteit Delft)从事博士后研究。2013年12月加入同济大学电信学院计算机系,主要研究方向为智能无人驾驶、室内外定位与导航、三维城市模型多尺度表达等。目前为同济大学“途灵”(TiEV)智能无人车研究团队负责人,参与多届基金委举办的“中国智能车未来挑战赛”。目前主持完成国家自然科学基金青年项目一项(课题编号41201379),曾参与多个973、863重点科研项目,在高水平期刊和会议中发表论文30余篇。
课程内容(2天)
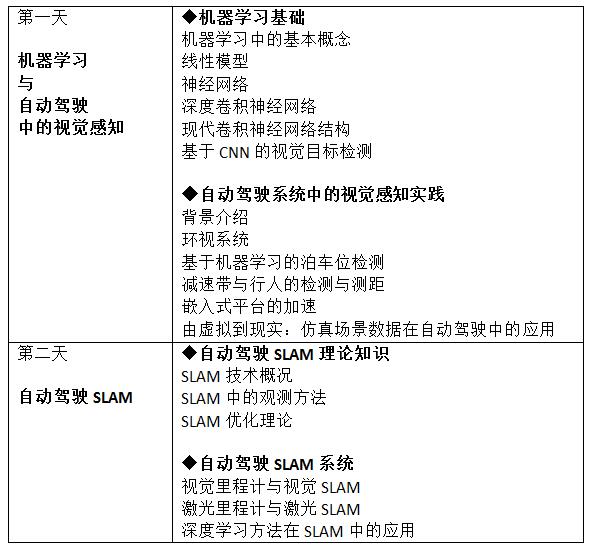
第一天
机器学习
与
自动驾驶
中的视觉感知
|
◆机器学习基础
机器学习中的基本概念
线性模型
神经网络
深度卷积神经网络
现代卷积神经网络结构
基于CNN的视觉目标检测
◆自动驾驶系统中的视觉感知实践
背景介绍
环视系统
基于机器学习的泊车位检测
减速带与行人的检测与测距
嵌入式平台的加速
由虚拟到现实:仿真场景数据在自动驾驶中的应用 |
第二天
自动驾驶SLAM
|
◆自动驾驶SLAM理论知识
SLAM技术概况
SLAM中的观测方法
SLAM优化理论
◆自动驾驶SLAM系统
视觉里程计与视觉SLAM
激光里程计与激光SLAM
深度学习方法在SLAM中的应用 |
开课信息
开课日期:2019年7月11日 - 7月12日
上课时间:9:00 – 16:30(午餐1小时)
主办单位:中国汽车产业培训基地
开课地点:上海市嘉定区安亭
培训规模:30-40人
提交报名信息,请扫描如下二维码或打开链接
 https://www.jsform.com/web/formview/59d19efbbb7c7c467e0cb08c
https://www.jsform.com/web/formview/59d19efbbb7c7c467e0cb08c
如需咨询更多详情,欢迎致电:021-50325218
注意事项
◆为确保您上课的权益,报名后,若未收到任何回复,敬请来电咨询确认。
◆为尊重讲师的知识产权,仅提供纸质讲义一份。
◆本课程因人数或其他因素造成课程取消,产培基地将无息办理退费,敬请见谅!