随着商用车电子技术的发展和技术水平的不断提高,以及客户对商用车在使用过程中人性化设计要求越来越高,威伯科汽车控制系统有限公司在这种大背景下开发了电子控制高度调节模块(ELM)产品,ELM是Electronic Leveling Module的缩写,是应用于挂车空气悬架系统的电子控制高度调节模块(见图1所示),可以通过操作遥控器来控制挂车空气气囊的升压,保压和降压,从而实现挂车车身高度的升高,保持和降低,以方便货物的装卸,ELM系统是为具有空气悬架的挂车而设计,另外在牵引车和客车的空气悬架上也可使用该产品。
电子控制高度调节模块的工作原理
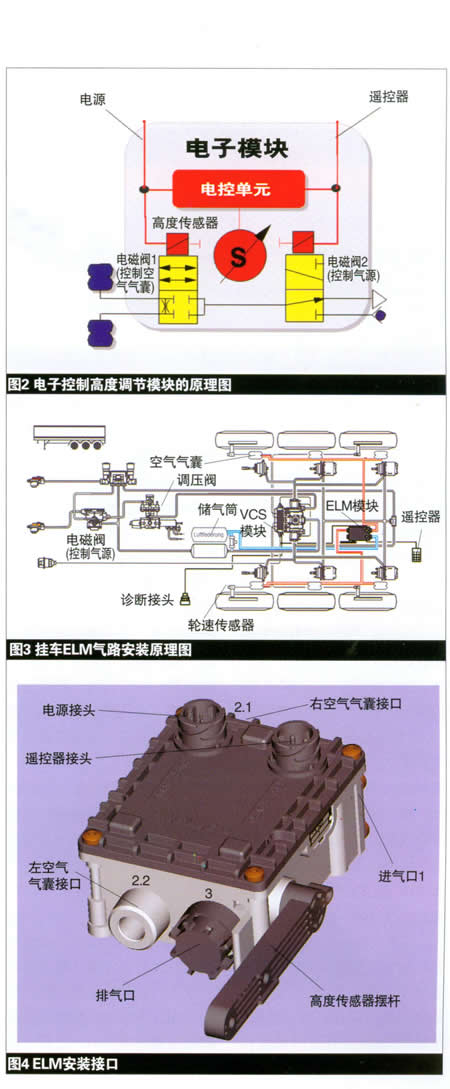
在常规的具有空气悬架的挂车通过使用旋转滑阀和高度阀等机械部件来实现升高、保持和降低挂车高度的功能,操作人员通过旋转滑阀的旋转手柄来控制空气气囊的升压,保压和降压,从而控制挂车车身高度。而电子控制高度调节模块在一个模块里高度集成了常规的旋转滑阀和高度阀的功能,模块包括高度传感器、电控单元、电磁阀、电源接头、遥控器接头。通过高度传感器连续测量在行车或在静止时车身与车轴的高度变化,然后电控单元根据获得的车身高度数据计算出车身的实际高度,同时与预先设定的正常高度相比较得出需要调整的高度量,通过控制电磁阀动作实现空气气囊的升压、保压和降压,以保证车辆车身一直保持在预先设置的正常高度。如图2所示,在挂车装卸货物时,操作人员可以通过遥控器按钮来控制挂车车身的高度,当按下遥控器升高按钮时,电控单元根据接受到的升高需求信号,然后发送控制信号到控制空气气囊的电磁阀1和控制气源的电磁阀2,此时电磁阀1处于气路连通的状态即如图2所示上面的位置,电磁阀2也处于气源连通的状态即如图2所示上面的位置,这样气源通过电磁阀2和电磁阀1进入空气气囊进行升压的过程;当按下遥控器停止按钮,电控单元根据接受到的停止需求信号,然后发送控制信号到控制空气气囊的电磁阀1和控制气源的电磁阀2,此时电磁阀1处于气路关闭的状态即如图2所示下面的位置,电磁阀2处于连通大气的状态即如图2所示下面的位置,这样空气气囊进行保压的过程;当按下遥控器降低按钮时,控制过程相同,但是电磁阀的位置不同,此时电磁阀1处于气路连通的状态即如图2所示上面的位置,电磁阀2处于连通大气的状态即如图2所示下面的位置,这样空气气囊的气压通过电磁阀1和电磁阀2进入大气从而进行降压的过程。
1.ELM系统在开发时,主要针对挂车进行设计的电子控制系统,也可以应用于客车和牵引车空气悬架的高度控制。
2.在各种载荷条件下,ELM系统通过控制空气气囊的压力使车身和车轴的相对高度一直保持在预先设定的高度。如在加载过程中,不改变其高度。
3.通过操作遥控器可以控制车身高度的升降,另外系统可以记忆不同的高度设置,一般可以记忆2个不同的货位高度。
4.ELM系统集成了常规地通过旋转滑阀和高度阀控制空气悬架高度的机械系统的功能,电子控制模块中包含高度传感器、电控单元、电磁阀、电源接头、遥控器接头,从而减少了零部件数量和安装空间,而且具有机械系统所没有的许多附加功能和技术优势。
5.ELM电控单元通过控制集成在模块中的电磁阀来实现保压、升压和降压的功能,而且在电磁阀中集成了横向节流阀的功能,当车辆转弯时,车轴左右的空气气囊的压力发生变化,此时可以通过横向节流阀对左右空气气囊的压力进行补偿,从而保证较高的动态横向稳定性。
6.在车辆行驶的过程中,为了避免一直对空气气囊进行充放气,在这种情况下系统对高度修正有延时功能,从而减少空气消耗和节约燃料。
7.为了保证车辆的行驶安全性,无论车身在任何高度下,当行驶速度超过一定的设定值时,一般设定为20Km/h,车辆自动回到正常行驶高度。
8.在车辆长时间处于静止状态的情况下,可能由于气路管路的密封性不高,导致气体泄漏使空气气囊的高度降低,此时,当打开点火开关时系统将对在关闭点火开关时调整好的高度自动进行重新调整。
9.由于ELM系统高度集成为一个电子控制模块,所以安装比较简单。
10.系统通过遥控器控制空气气囊高度,所以高度调节比较简单。另外系统标定不需要其他专用仪器,用遥控器就可标定。
11.操作安全,操作人员可以用遥控器在危险区外操作。
12.ELM可以与挂车防抱制动系统(VCS)或电子控制制动系统(EBS)一起使用。
ELM系统的布置和安装
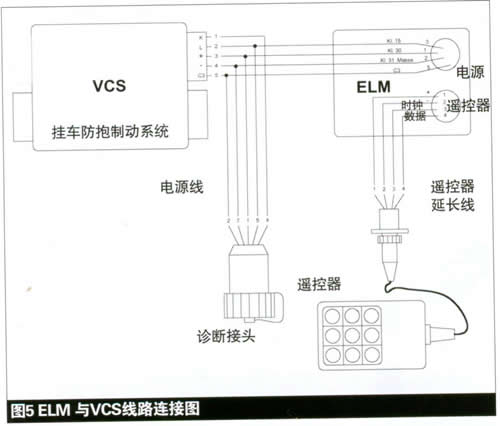
挂车ELM气路系统的布置:ELM系统由电子控制模块、遥控器、电源线、遥控器延长线、连接杆等组成,系统的布置如图3所示,供气管路为图中蓝色管路连接气源储气筒和电子控制模块进气口,为ELM控制空气气囊高度提供气源;控制管路为图中红色管路连接电子控制模块的气压输出口和左右空气气囊的进气口,为ELM控制空气气囊的气压提供途径。
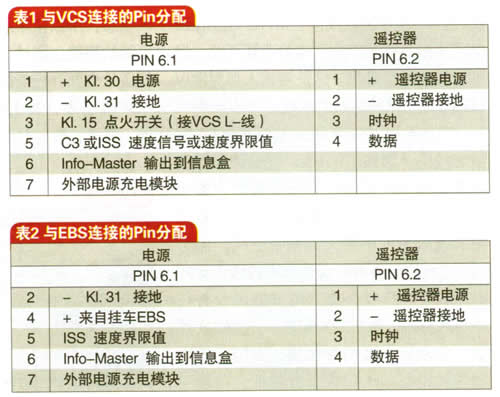
ELM电子控制高度调节模块的安装:电子控制高度调节模块的安装位置一般用4个M6的螺栓固定在车架或车架横梁上,电器接口向下,排气口处于水平位置。电子控制高度调节模块的气路接口如图4所示,进气口1螺纹为M16x1.5接储气筒,出气口2.1和2.2螺纹为M16x1.5接空气气囊,一般2.1口接右空气气囊,2.2口接左空气气囊。
高度传感器的摆杆安装位置:车辆在正常高度时,摆杆应处于水平位置;在安装时,如需用摆杆延长杆时,可用2个M6的螺栓把延长杆和摆杆固定在一起。
ELM电子控制高度调节模块的电器连接:如图5与VCS线路连接图,其中电源线一端接VCS诊断接口,另一端与ELM电源接口相连,诊断接头插座固定在车架横梁附近易接近的地方,并进行适当保护(例如,置于保护罩内或密封盒中)。遥控器延长线一端与ELM连接,另一端与遥控器连接,遥控器的位置应有良好的接近性,并应防水、防尘,如固定在车架横梁上密封的盒中。可选择遥控器固定座固定遥控器。
Pin的分配:当与VSC挂车电子防抱制动系统和EBS挂车电子控制制动系统一起使用时,pin的分配如表1和表2。
ELM系统的标定
1.初始状态:在ELM系统标定前,首先应确认基本制动系统工作正常和参数正确,另外ELM在未标定的初始状态是在紧急操作模式中,此时可以进行空气气囊高度的升高和降低控制,但系统不能进行自动高度调节功能。
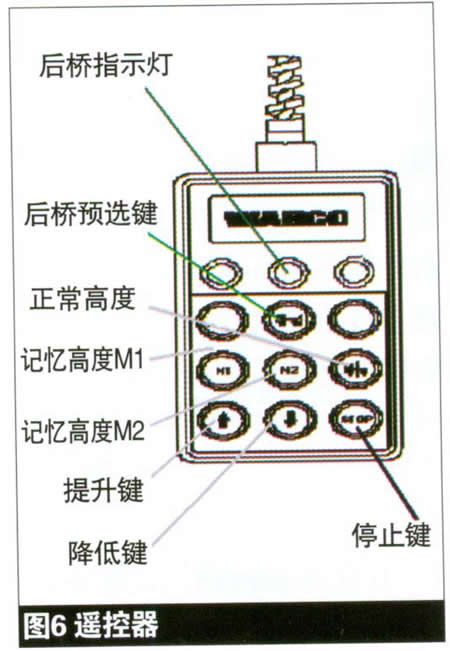
2.进入标定模式(见图6):按下停止键+提升键+降低键,持续时间至少1秒钟(先按停止键,然后同时按提升键和降低键),此时听到2声阀响进行声学确认。
3.系统标定模式(见图6):先按下停止键,然后按下如下所述的第2个按钮进行不同高度的标定。行车高度:按下停止键+正常高度键,持续时间至少1秒钟,此时听到1声阀响进行声学确认。上限高度:按下停止键+提升键,持续时间至少1秒钟,此时听到1声阀响进行声学确认。下限高度:按下停止键+降低键持续时间至少1秒钟,此时听到1声阀响进行声学确认。
4.退出标定模式:按下停止键持续时间至少3秒钟,此时听到3声阀响进行声学确认,或者关掉电源或者速度大于0均可退出标定模式。
5.标定检查:在没有标定错误信息的情况下,按下行车高度按钮,此时空气气囊的行车高度能够自动进行调整;若标定有错误,此时听不到电磁阀动作的响声进行声学确认
6.储存记忆高度:首先按一下后桥预选键,后桥指示灯亮进行确认。然后通过按遥控器的“提升”或“降低”键,使车辆移动到理想高度,此时先按下停止键,并保持再按M1/M2,然后松开2个键即可储存下记忆高度。
ELM常见故障的原因及排除
ELM电子控制调节模块在使用过程当中,经常出现的故障主要有以下几种:
1.标定错误:上限高度,下限高度,正常高度相隔太近,检查摆杆角度至少相差15°以上;ELM模块安装不正确,检查模块的电插头必须向下。
2.速度信号错误:导线断路或短路;制动系统参数错误;制动系统故障或传感器故障;举升轴控制阀短路。
3.可能性故障,仅可以由遥控器控制高度,行车高度无法自动调节:系统气压过低,在打开点火开关30分钟后,车辆仍未达到要求的行车高度。
4.电源供应错误:电源电压不稳定,当电压小于19V时,系统自动关闭。
