金智林 翁建生 胡海岩
南京航空航天大学
摘要 为了提高SUV高速紧急操纵下防侧翻性能,提出了基于模糊差动制动控制的防侧翻控制策略。研究中考虑轮胎非线性因素的影响,建立了4自由度非线性汽车侧翻模型,并通过横向载荷转移率负反馈设计了参数自整定的模糊PID控制器,以驱动电控机械制动系统(EMB)产生抗横摆力矩防止汽车侧翻。典型工况下的算例分析结果表明,该控制策略能充分发挥EMB响应快的特性,防止SUV高速紧急操纵下侧翻。
主题词 SUV 侧翻 差动制动 模糊PID控制
1 前言
多功能运动型汽车(SUV)因具有越野车的动力性、通过性以及轿车的舒适性而倍受欢迎,然而,SUV侧翻安全问题往往是用户购车时的主要顾虑。汽车侧翻分2种类型:绊倒型侧翻和紧急操纵引起的非绊倒型侧翻。通常,SUV发生的后一种侧翻造成的危害是非常致命的。美国国家公路交通安全管理局最新统计数据表明,SUV在抗侧翻安全星级评定试验下平均侧翻概率达28%以上,远大于客车以及轿车侧翻概率。
为了降低侧翻事故率,提高汽车安全性能,Ah—madian M采用模糊逻辑控制通过调节半主动悬架的阻尼来减小侧倾角,但半主动悬架阻尼调节范围有限,在恶劣工况下控制效果不明显;Sampson等提出了带液压的主动横向稳定杆抗侧翻最优控制,但主动横向稳定杆不仅价格昂贵,而且在中小型汽车上安装非常困难;Johansson B等研究了基于主动转向应用线性参考模型的LQ方法控制侧翻,但主动转向控制改变了驾驶员的操作意图,不适合高速紧急操纵工况下防侧翻;Chen B等基于差动制动产生直接横摆力矩进行了防侧翻控制研究。随着制动防抱死系统、电子制动力分配装置、汽车稳定控制系统等技术在汽车中的广泛应用,对制动力的控制变得越来越容易,而且制动过程可以降低车速、减小横向力以及横摆力矩。因此,差动制动控制成为一种非常有效的抗侧翻控制措施。
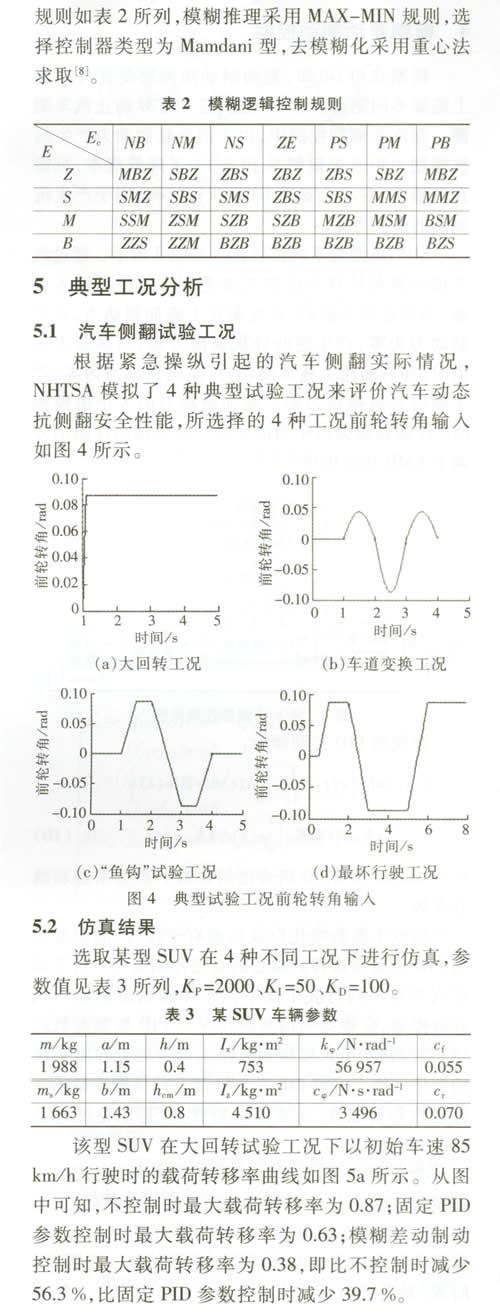
本文针对由高速紧急操纵引起的SUV侧翻,进行了基于模糊PID差动制动的防侧翻控制研究。为了更加真实反映SUV的侧翻动态性能,建立了一个非线性4自由度汽车侧翻模型,设计了模糊PID控制器及电控机械制动(EMB)机构,实现了差动制动控制策略的力矩输出。
2 SUV侧翻模型建立
2.1 车体侧翻模型
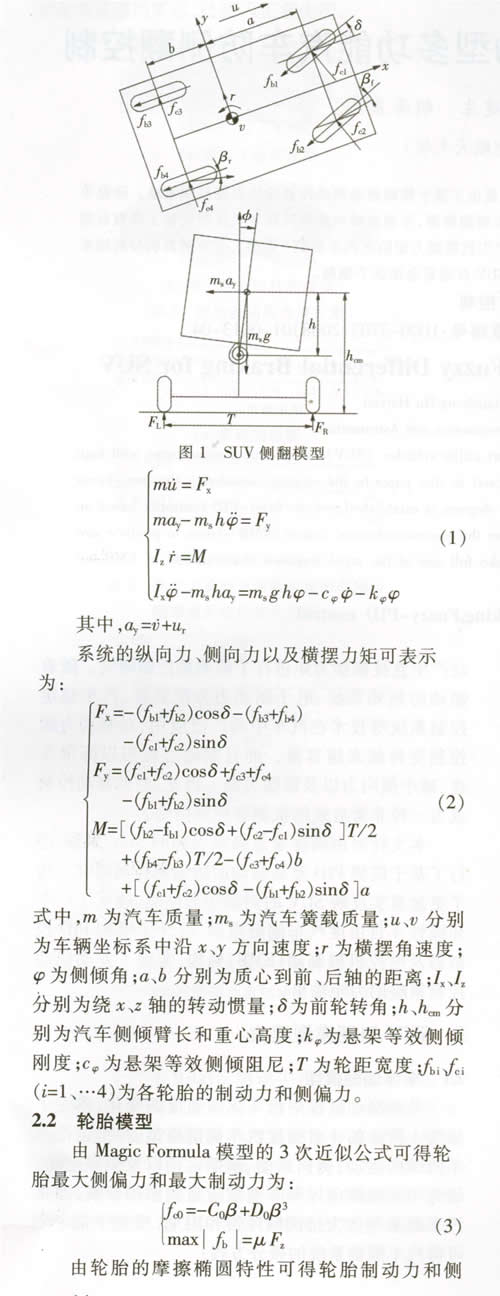
考虑制动过程中汽车纵向速度的变化,建立了如图1所示的4自由度汽车侧翻模型,模型包括汽车的纵向运动、侧向运动、横摆运动以及侧倾运动。研究中忽略侧向风和非簧载质量侧倾的影响,而将汽车悬架等效为抗侧倾弹簧和阻尼,根据牛顿定律可得汽车侧翻系统的微分方程:

2.3 EMB模型
EMB系统与传统液压制动系统相比,液压管路由线路取代,制动盘压力由安装在每个车轮上的电机驱动执行机构产生,电机由电控单元统一控制,所以产生制动力响应速度更快,制动力分配更容易控制。
EMB系统主要由电机、减速器、自增力机构、制动盘以及控制单元组成。本研究选用稀土永磁无刷直流电机,设计了行星齿轮减速器以及由螺杆和制动蹄块组成的白增力机构。自增力机构产生正压力,作用在制动盘上产生制动力矩。因此,得到EMB系统输出制动力矩与电动机输入电压的动力学特性关系:
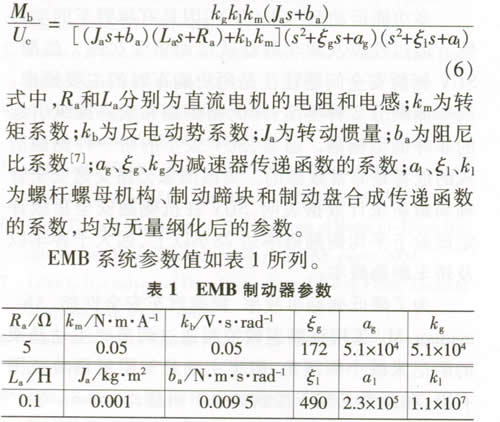
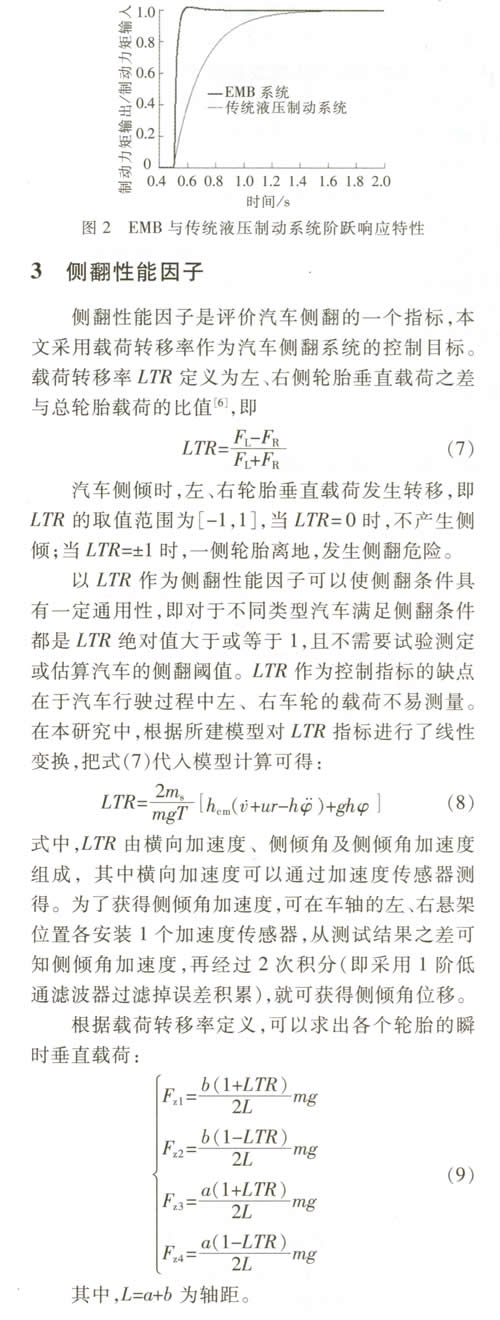
图2为EMB系统与传统液压制动系统阶跃响应特性的对比。从图2中可以看出,EMB在0.5s时输入电压给定阶跃信号输入,EMB响应在0.53s时可以输出80%的最大制动力矩,响应时间为0.03s,而传统液压制动系统达到这个制动力矩的响应时间需要0.32s。
4 模糊差动制动控制
根据式(1)可知,差动制动防侧翻是在各车轮上施加不同制动力、产生抗横摆力矩M防止汽车侧翻。在汽车侧翻控制中,由于前外轮制动力产生的抗横摆力矩效果最好,因此,为了降低成本,只需在前轴左、右车轮安装EMB执行机构,用于产生抗侧翻的横摆力矩。
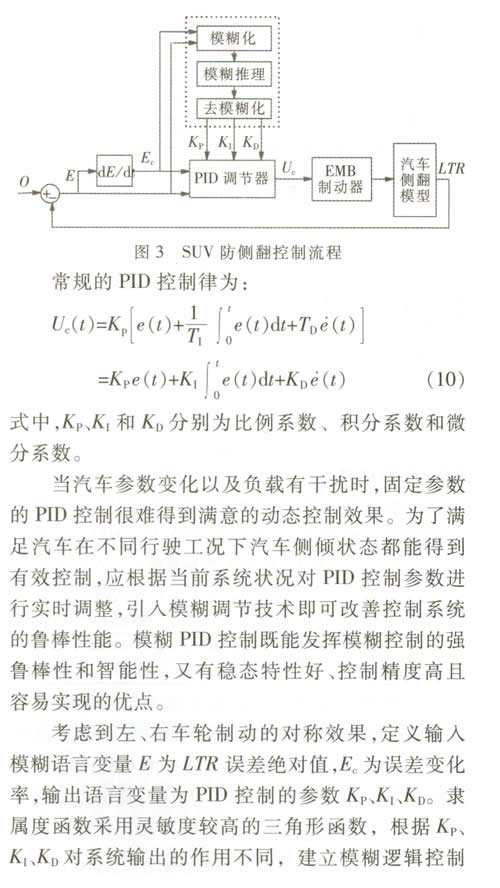
SUV防侧翻系统控制流程如图3所示。通过汽车横向载荷转移率反馈与参考值比较得到输入误差,当误差为负值时,在左前轮上施加制动力,右侧制动力为零,产生逆时针抗横摆力矩;当误差为正值时,在右前轮上施加制动力,左侧制动力为零,产生顺时针抗横摆力矩。施加制动力的大小由模糊PID控制器根据汽车当前状态计算后输出控制信号调节EMB执行机构。
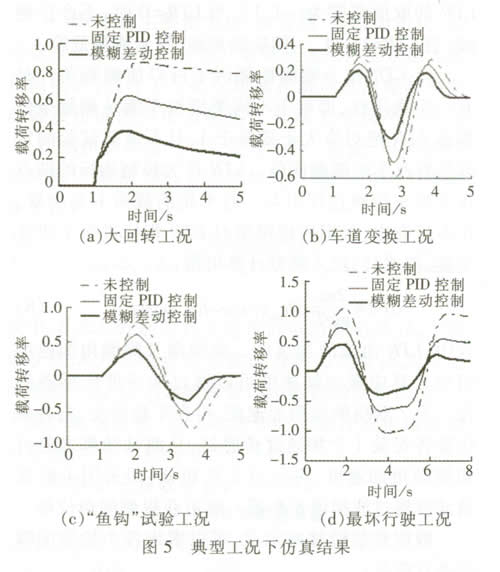
该型SUV以初始车速85km/h进行变车道工况行驶,该工况模拟了汽车行驶时紧急避让障碍物工况,其载荷转移率曲线如图5b所示。从图中可知,模糊差动制动控制时,最大载荷转移率比不控制时减少47.4%,比采用固定PID参数控制减少35.4%。
该型SUV以初始车速85km/h在“鱼钩”试验工况下行驶的载荷转移率曲线如图5c所示。从图中可知,模糊差动制动控制时最大载荷转移率比不控制时减少51.9%,比固定PID参数控制减少38.3%,而且比固定PID参数控制更快趋于平稳。
该型SUV以初始车速100km/h行驶时的最坏行驶工况载荷转移率曲线如图5d所示。从图中可知,不控制时汽车在1.66s时发生侧翻;固定PID参数控制和模糊差动制动控制都能使汽车避免侧翻,但模糊差动制动控制时最大载荷转移率比不控制时减少58.1%,比固定PID参数控制减少37.6%。
6 结束语
针对SUV在高速紧急操纵情况下引起的侧翻,进行了基于模糊PID差动制动的防侧翻控制研究,可以得出:
a. 所建立的4自由度非线性汽车侧翻模型能描述制动过程中车体纵向速度的变化以及轮胎与地面附着力的非线性影响,更能真实反映SUV在高速转弯制动时的侧翻规律。
b. EMB系统比传统液压制动系统响应快,能更好的满足紧急操纵工况下差动制动抗侧翻的实时性要求。
c. 采用模糊差动制动控制策略对汽车侧翻进行控制,既有强鲁棒性和智能性,又有稳态特性好、控制精度高且容易实现的优势;该策略控制系统比不带控制系统以及固定PID参数控制系统的抗侧翻性能均有较大的改善。
