郭建华 李 静 李幼德
吉林大学
摘要 以车辆动力学软件Carsim和Matlab/Simulink为平台,分别建立了基于滑模变结构控制的主动前轮转向(AFS)和滑移率门限控制的防抱死制动系统(ABS)控制器模型,并将2种控制系统进行了集成,建立了联合仿真模型。仿真结果表明,在分离路面紧急制动工况下,通过将AFS与ABS进行集成控制,能够进一步提高ABS的制动效能,在保持车辆制动稳定性的同时缩短了制动距离。
主题词 主动前轮转向 防抱死制动系统 集成控制
1前言
汽车在道路上行驶时常会出现驾驶员不能预料的横摆干扰,例如受到侧向风作用,或在两侧附着系数不同的路面(分离路面上)紧急制动,或某个轮胎胎压偏低,或爆胎等,都会导致车辆突然横摆并且失控。根据资料统计,车辆因丧失方向稳定性引起的交通事故占总数的38%以上。
为了提高汽车的行驶安全性,各种汽车主动安全控制系统不断出现,如可以通过电子稳定控制程序来改善车辆在极限工况下的稳定性。同样,主动转向也可以达到同样的目的,并且由于主动转向可以更直接、更迅速地对车辆运动进行干预和控制,有工作能量小、轮胎磨损小等优点。将多种主动安全控制系统集成起来进行底盘综合控制是汽车学科重要的研究领域之一。
本文以车辆动力学仿真软件Carsim和Matlab/Simulink为平台,分别建立了基于滑模变结构控制的主动前轮转向(AFS)和基于滑移率门限的防抱死控制系统(ABS)的控制器,并将这两种控制系统进行了集成。在分离路面上紧急制动工况下,通过将AFS与ABS进行联合控制,进一步提高ABS的制动效能,在保持车辆制动稳定性的同时缩短了制动距离,提高了车辆的操纵性能。
2 主动前轮转向原理与仿真平台简介
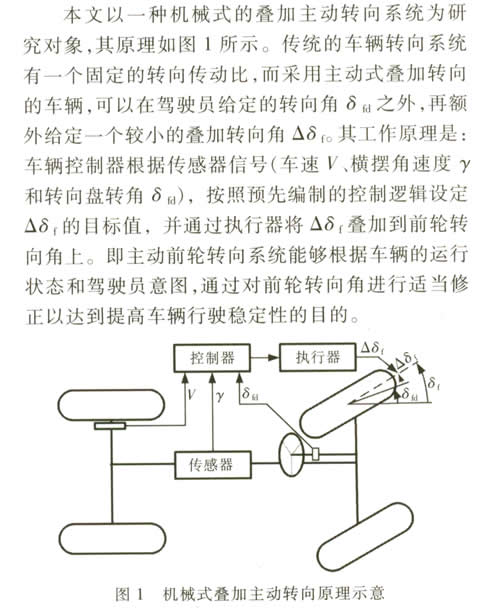
2.1 主动前轮转向原理
2.2 车辆仿真平台简介
采用车辆动力学软件Carsim(试用版)作为车辆系统仿真平台,并使用Matlab/Simulink软件建立控制器模型,进行联合仿真。
Carsim软件是MSC公司开发的专门为轿车、轻型货车和多功能车辆的仿真分析而设计的软件。用户可在图形操作界面中进行车辆系统参数和仿真参数的设置。Carsim软件具有良好的可扩展性,它通过S函数实现了与Matlab/Simulink软件的无缝连接。用户可以在Simulink中建立控制器模型,控制Carsim的车辆模型进行联合仿真,其仿真实时性好、车辆模型精确,得到的仿真结果更真实有效。
3 控制系统设计
3.1 主动前轮转向控制器设计

4 联合系统仿真分析
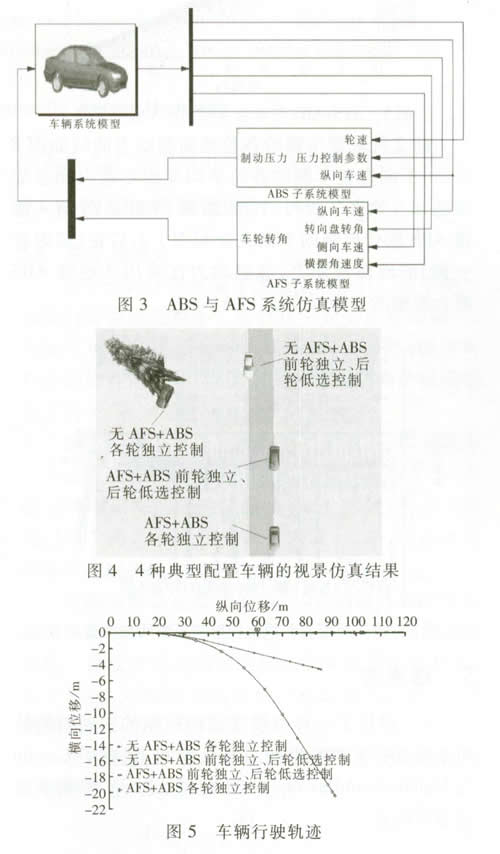
本文采用Matlab/Simulink软件建立的AFS和ABS数学模型,分别建立了AFS和ABS的控制器,然后在Simulink中调用Carsim提供的车辆动力学仿真模块(S函数形式)进行联合仿真,仿真模型如图3所示。仿真工况为分离路面车辆直线紧急制动;路面选为分离路面,左、右两侧的附着系数分别为0.2和0.5;驾驶员模型为,车辆行驶路线为直线,驾驶员反应时间为0.5s;初始车速为90km/h。分别选择了4种典型配置的车辆进行仿真:AFS+ABS各轮独立控制;AFS+ABS前轮独立、后轮低选控制;无AFS+ABS前轮独立、后轮低选控制;无AFS+ABS各轮独立控制。
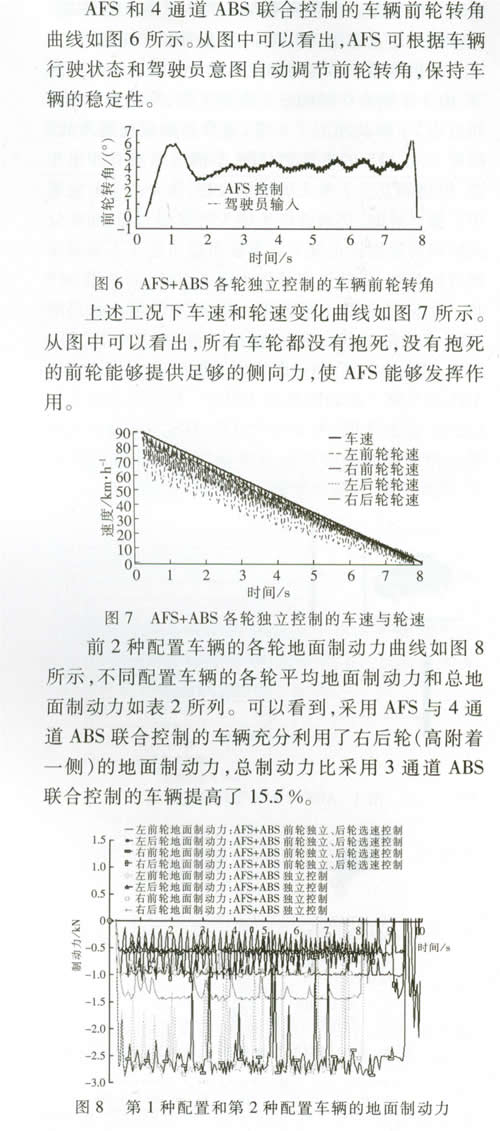
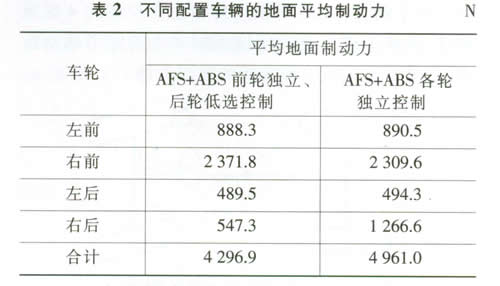
使用Carsim软件中三维动画回放工具进行的4种不同配置车辆的视景仿真结果如图4所示。从图中可以看出,没有采用AFS的4通道ABS车辆,在分离路面紧急制动工况下,车辆冲出了车道,完全失去了稳定性,尽管制动距离较短,但在这种工况下,由于车辆会在瞬间发生横摆失稳,驾驶员没有时间反应,车辆就冲出了车道,很容易酿成交通事故;同样,无AFS的3通道ABS车辆虽然没有冲出车道,但仍然发生了很大的横摆失稳,这是由于前轮采用了独立控制,仍然会产生很大的横摆力矩,而在分离路面高速制动工况下,驾驶员也可能来不及对车辆进行控制,仍然很容易发生交通事故;而采用AFS时,无论是采用3通道的ABS还是采用4通道的ABS,车辆都基本沿着直线行驶(图5),其中,采用4通道ABS的车辆(制动距离为105m)比采用3通道ABS的车辆(制动距离为120m)制动距离缩短了12.5%。由此表明,本文所设计的AFS与4通道ABS联合控制系统能够在保持车辆制动稳定性的前提下,提高ABS的制动效能,大幅缩短制动距离。
5 结束语
a. 设计了一种滑模变结构控制的主动前轮转向系统,并与ABS进行了联合控制,建立了Carsim与Matlab/Simulink联合仿真模型,进行了车辆系统动力学仿真。
b. 在分离路面紧急制动工况下,采用AFS与4通道ABS的车辆不仅保持了制动时的稳定性,而且制动距离更短,体现了本文设计的集成控制系统的优越性。
