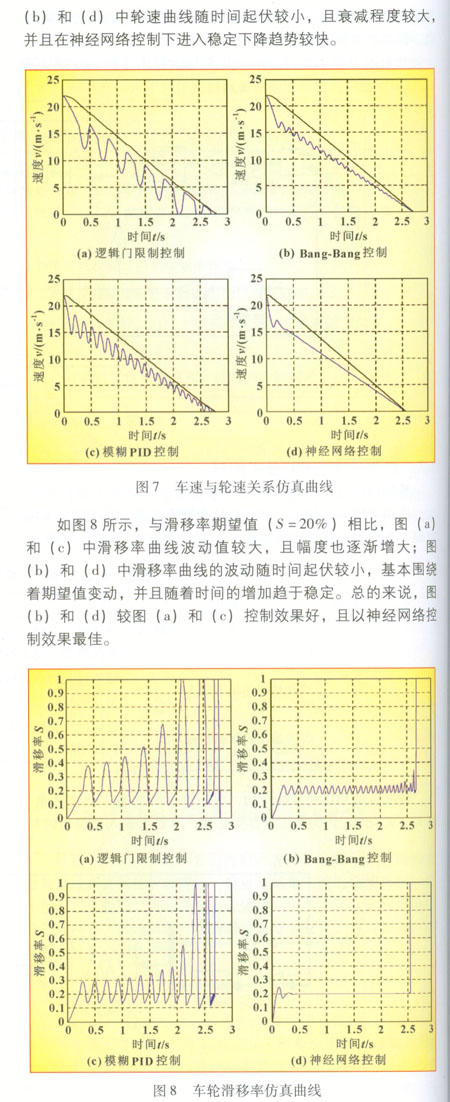
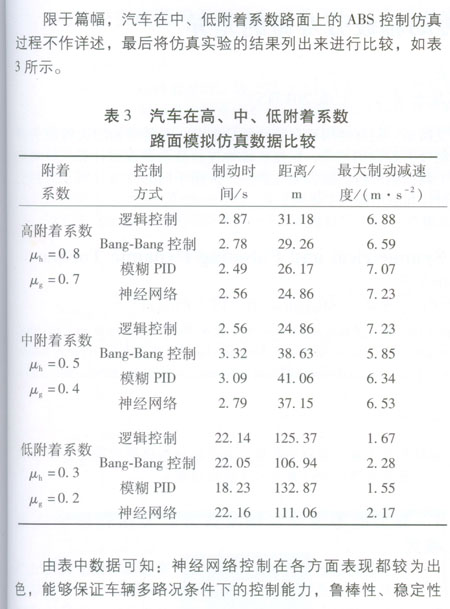
梁勇 马兴平
河南大学物理与电子学院
【摘要】基于当前着力提高ABS系统控制精度的研究热点,介绍ABS的基本组成与工作原理;以滑移率为研究对象,详细介绍逻辑门限值控制、Bang-Bang控制、模糊PID控制、神经网络控制4种方法的基本原理并建立了各自的控制模型,在MATLAB 7.0/Simulink联合仿真平台上分别针对车辆模型在高、中、低附着系数路面上进行制动仿真。仿真结果表明:神经网络控制效果较好,具有很强的适应性和鲁棒性。
关键词:ABS Matlab 7.0/Simulink仿真 控制精度
0 引言
汽车的安全问题是当前社会各界关注的焦点,随着我国居民汽车保有量日益增加,因车祸造成的重大人员伤亡和财产损失率逐年升高。这其中,因制动问题导致或引起的不在少数,统计结果表明:车辆因制动抱死而失去控制所致的事故约占10%左右。因此,汽车在出厂或者年审时都要求其具有并保持良好的制动效能和操纵稳定性,并以此作为硬性指标来加以规定和限制。
当车辆处于制动抱死状态时,在其抱死松开或完全停止之前车轮要拖滑一段距离,这个过程会加剧轮胎磨损、增加制动距离从而产生潜在危险,而且长此以往会导致轮胎的摩擦因数和附着系数下降,使车辆无法正常转向或产生横摆和侧滑倾向而失去操纵稳定性。
ABS(Anti-lock Braking System)系统是专门为解决制动抱死问题而开发的装置,它通过实时测定车轮的滑移率并自动调节制动力矩,避免车轮抱死的同时保证最佳的制动效能。其良好的社会和经济效益在20世纪70年代得到了重视,并在之后的几十年里获得了广泛的应用,现在ABS已经成为轿车的标准配置。
当前,ABS技术和产品已经较为成熟,提升点主要集中在其能否提供精确的控制,作者将借助模拟仿真分析方法就几种典型的控制方法展开研究,以期能够建立一种更为实用、可靠的车辆制动控制系统。
1 ABS基本组成及工作原理
1.1 ABS的基本组成
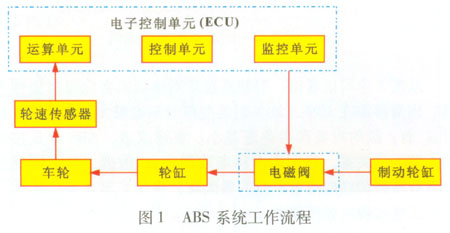
ABS通常都是由轮速传感器、ECU和压力调节装置三部分组成。其中,轮速传感器是ABS系统中的源头设施,它采集得到的车速信号的准确性决定着控制功能的实现,目前普遍使用的有磁电式和霍尔式两种类型;ECU是ABS系统中的决断设施,其作用就是接收轮速传感器发出的信号,并对其进行分析处理得出一系列参数修正指令,并发送至压力调节装置,完成系统功能;压力调节装置是ABS系统中的执行机构,主要从ECU接收指令来实际调节制动压力,通过控制压力的实时变化来实现防抱死功能。图1所示为典型的ABS系统工作流程简图,可以看出通过以上组成部件功能的循环执行,ABS系统即可完成对车轮抱死状态的实时调整。
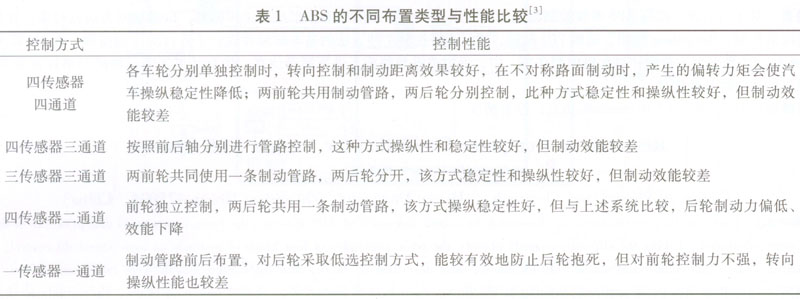
1.2 ABS的布置类型及其对性能的影响
ABS的类型根据轮速传感器的安装数量(1~4)和通道数(1~4)的不同而有所差异。其控制方法也可以根据通道对车轮的控制映射分为同时控制式(一条通道对应多个车轮)和独立控制式(一条通道对应一个车轮),而在同时控制方式中又随车轮位置的不同有异轴控制(一个通道对应不同轴的两车轮)和同轴控制(一个通道对应相同轴的两车轮)之分。表1所示为ABS在采用不同传感器数量和通道搭配时的性能比较。
和适应性都较强。
4 结论
以ABS控制技术作为研究对象,重点分析了逻辑门限值控制、Bang-Bang控制、模糊PID控制、神经网络控制等控制方式,经过仿真分析,结果表明神经网络控制效果最佳。
作者所做的仿真试验是在理想情况下进行的,实验结果与实际复杂路况下的制动情形有较大差距。作者将在后续工作中细化模型、斟酌参数,以其能够更精确地模拟实车工况。