基于开、闭环控制的车辆操稳测评标准体系研究
张志国 梁荣亮 王久明 高明秋 张相杰
中国汽车技术研究中心
【摘要】 通过对国内外车辆操稳测试的标准体系、评价指标、评价方法及测试规程进行系统分析,从定性和定量角度提出适用于各类车型操纵和行驶稳定性的测试评价方法,为后续各类车型特别针对营运车辆的操稳测试规程及评价指标的合理性修订提供借鉴。
关键词:操纵稳定性 汽车 测试评价 标准体系
0 引言
操纵稳定性包含两个相互关联的部分:一是汽车确切响应驾驶员转向指令能力的操纵性;二是汽车受外界扰动(路面或风)后恢复原来运动状态的稳定性。近年来,随着决定车辆特性的制动、驱动及转向相关的控制技术的普及,汽车操纵稳定性的给定自由度也有了大幅度的提高。
尽管理论分析为车辆操纵和行驶稳定性的评价提供便利,但是由于深入理论分析存在较多困难,如完善车辆动力学模型构建的复杂性以及准确的车辆动力学参数难以获得等,所以理论分析仅作为基础参考,当前对于车辆操纵和行驶稳定性的评价主要还是基于实车试验的方法。在利用试验方法评价汽车操纵和行驶稳定性方面,目前主要从以下几个方面进行。
(1)通过试验测量开环和闭环条件下汽车的主要运动量,研究人、车闭环系统的特性,并对此进行研究和评价;
(2)通过驾驶员测试过程中的主观感觉,对整车运动特性进行评价;
(3)通过汽车动力学模型和人、车闭环系统模型,从理论上来研究和评价汽车的操纵稳定性。
1 车辆操稳测试开、闭环评价
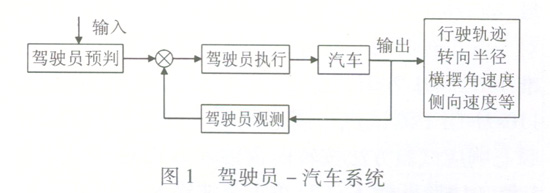
把汽车本身当做一个单独控制系统的开环评价方法认定汽车操纵稳定性是整车自身属性,不包括驾驶员主观认为特性,单纯按照车辆的输入和输出进行评价。而闭环评价方法充分考虑驾驶员主观操纵因素,以及与汽车特性的配合,驾驶员-汽车闭环控制系统如图1所示。
图1中输入是指道路等外界环境信息,驾驶员通过该信息预瞄车辆行驶方向并判断车辆行驶状态,然后给汽车以转向指令(转向盘角输入),最终输出汽车转向运动量,包括行驶轨迹、转向半径、横摆角速度、侧向速度等。
随着对汽车操纵稳定性的深入研究,闭环评价方法日益被重视。20世纪90年代,郭孔辉院士提出了基于人-车-路闭环系统的评价方法,该方法在考虑了影响汽车操纵主动安全性的各种因素的基础上,提出了物理明确的各个单项指标,并利用频域统计分析方法,提出了闭环系统主动安全性的综合评价与优化设计方法。2001年,吉林大学汽车动态模拟国家重点实验室利用自主开发的驾驶员模拟器进行了操纵稳定性试验,对汽车操纵稳定性综合评价指标的合理性进行了验证。同年,郭孔辉等建立二阶预瞄跟随驾驶员模型和神经网络驾驶员模型,分析驾驶员行为对汽车操纵稳定性的影响,从而使考虑了驾驶员生理限制后的总评价指标更能接近于真实的人-车闭环系统的特性。2005年,赵伟平等提出了同时考虑汽车操纵性和稳定性的加权操纵稳定性评价指标和考虑各种车速重要性的加权均匀操纵稳定性评价指标。2010年,黄建兴等基于虚拟样机技术,提出了一种人-车闭环操纵稳定性综合评价指标权重的确定方法,进一步补充和完善了汽车操纵稳定性综合评价理论。经过十几年来的研究,综合评价方法与理论得到很大完善。
2 国内外车辆操稳测试评价体系现状
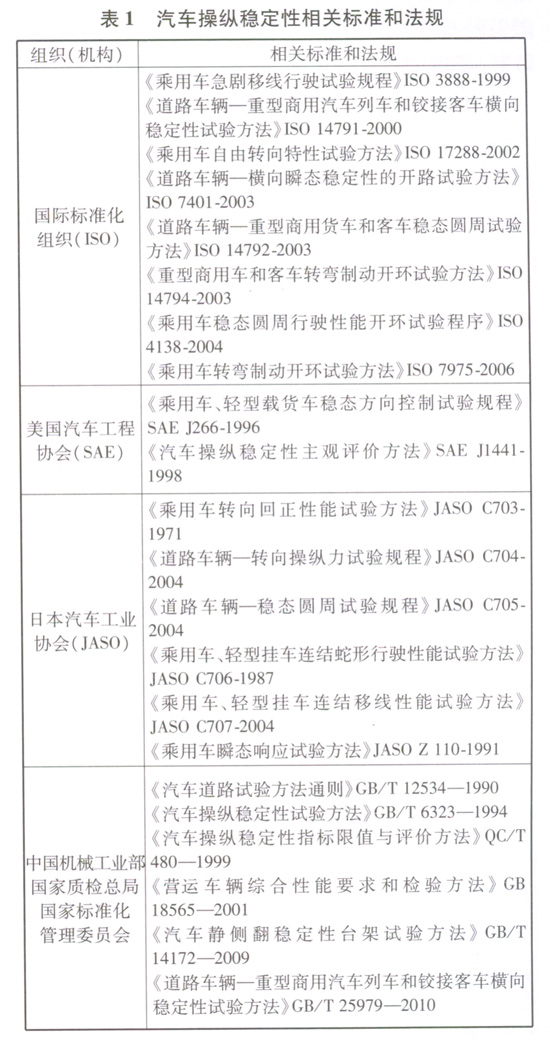
目前,国内外已针对现有评价体系制定了较为完善的标准试验方法。从上世纪60年代开始,美国汽车工程协会(SAE)、日本汽车工业协会(JASO)以及国际标准化组织(ISO)等相继制定并实施了一系列汽车操纵稳定性法规或标准,我国自上世纪80年代开始,基于本国国情并参照国外标准,制定并不断完善相关试验标准。目前,各国所采用的操纵稳定性试验评价方法种类颇多,常见的试验评价方法主要有:角阶跃试验、角脉冲试验、正弦角输入试验、回正性试验、蛇形试验、移线试验以及稳态圆周试验等。相关标准和法规见表1。
我国在1986年由机械工业部汽车工业司制定了《汽车操纵稳定性试验方法》的6项国家标准GB/T 6323-1986,之后制定了《汽车操纵稳定性指标限值与评价方法》GB/T 13047-1991,2001年,国家又颁布了《营运车辆综合性能要求和检验方法》GB 18565-2001用于测试营运车辆转向操纵性,2011年,国家质检总局、国家标准化管理委员会联合颁布实施,并在2012年1月1日正式实施了GB 26778-2011《汽车列车性能要求及试验方法》。现阶段我国主要依据GB/T 6323-1994、QC/T 480-1999、GB 18565-2001以及GB/T 25979-2010进行汽车操纵稳定性的试验与评价。
2.1 稳态回转试验
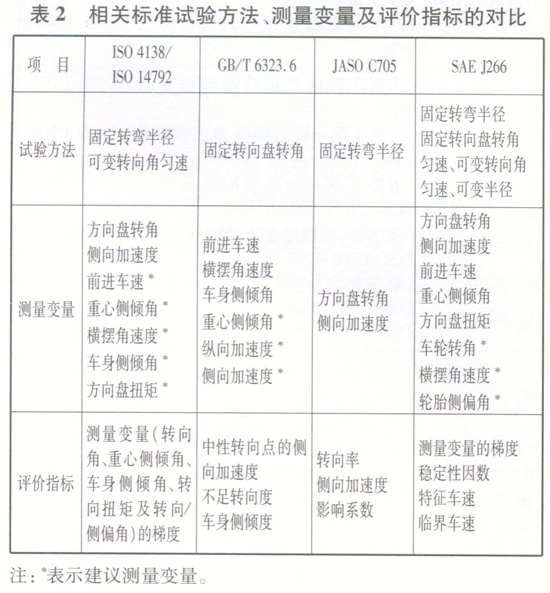
稳态回转试验是为了测定汽车在对转向盘转角输入达到稳定状态时,汽车的稳态横摆响应。稳态回转特性直接影响汽车的方向控制,保持适度的不足转向才能保证车辆行驶稳定性,目前,关于此方面的国内外标准有:GB/T 6323.6-1994、ISO 4138-2004/ ISO 14792-2003、SAE J266-1996和JASO C705-2004,而欧洲在这方面主要依据ISO标准,如BS/ISO 4138。各标准试验方法、测量变量及评价指标对比情况见表2。
2.2 瞬态响应试验
瞬态响应的目的是测定汽车的瞬态响应特征。在汽车操稳试验中以不同转向角输入,相应得到相关变量的时域或频域响应特性,根据时域、频域的特征值和特征函数来评价。当前,国外对于汽车转向瞬态响应特性试验主要依据国际标准ISO 7401-2003,另外,日本也制定了JASO Z110-91用于测试汽车瞬态相应。在这些标准中,瞬态响应试验方法按转向盘输入方式的不同分为5种:(1)阶跃输入;(2)单正弦波输入;(3)随机输入;(4)三角脉冲输入;(5)连续正弦波输入。前2种是获得时域响应特性的方法,后3种是获得频域响应特性的方法,在实践中可以任意选取1种方法得到相关变量的时域和频域响应特性对汽车操纵稳定性进行评价。我国在GB/T 6323.2-1994和GB/T 6323.3-1994中分别应用了转向盘阶跃输入法和转向盘三角脉冲输入法。一方面,阶跃输入可涉及从线性区至非线性区的很广领域,与主观评价也容易建立对应关系,因此被广泛采用;另一方面,脉冲输入操作简单,可以只在较宽的试验跑道上进行。
2.3 转向回正性能试验
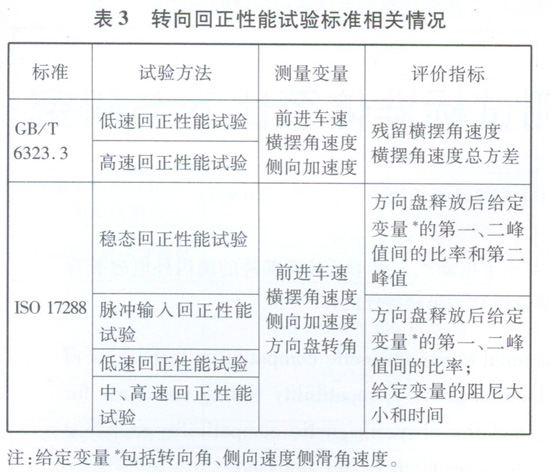
转向回正性反映的是汽车自曲线运动回复到直线行驶的过渡过程的性能,可测定汽车的转向盘力输入反应特征。转向回正性影响整车的安全性和舒适性。现阶段,关于转向回正性能试验的国内外标准有GB/T 6323.3-1994、ISO 17288.1-2002和JASO C703,美国和欧洲等同家依据ISO标准。
表3反映了各标准在测量变量和评价指标方面的情况,GB的试验方法分为低速和高速回正性能试验两种,对于最高车速超过100 km/h的汽车,要进行高速回正性能试验。ISO根据转向盘初始输入方式的不同分为稳态和脉冲输入回正性能试验,并规定试验标准纵向车速为100±20 km/h,也正是由于ISO考虑了转向盘的初始输入,所以在试验中需要测量转向盘转角变化特性,利用转向盘释放后转向角、侧向速度和侧滑角速度时域响应曲线上的相关参数进行评价。
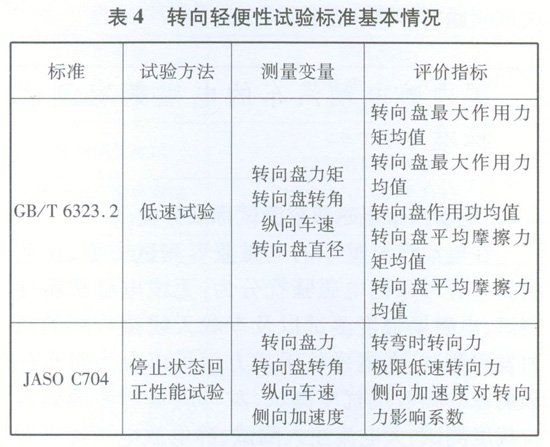
2.4 转向轻便性试验
作为汽车操纵稳定性的重要内容,转向操纵轻便性试验的目的是测量汽车驾驶时操纵转向盘转动的轻便程度。目前,国外对于转向轻便性试验并没有统一国际或国家标准,主要是因为表现转向盘轻便性能的方法并不成熟。我国的GB/T 6323.2-1994和日本的JASO C704-2004中规定了汽车转向轻便性能试验方法。表4是GB和JASO相关标准的基本情况。
2.5 侧风稳定性试验方法
汽车侧风稳定性是指行驶汽车在侧风干扰下,趋于恢复其原来的运动状态的能力;侧风稳定性试验的目的是确定高速行驶时侧风因素对汽车操纵稳定性的影响。
日本于1976年制定JASO Z108用于测定汽车的侧风稳定性;另外,国际标准化组织也制定了通用的ISO 12021-2010,此标准中规定用侧风发生器模拟自然阵风,操纵汽车行驶过侧风带,测量纵向车速、侧向偏移、横摆角速度、侧向加速度及转向角等参数。进行转向盘修正测定时,使汽车高速通过侧风吹过的跑道,驾驶员驾驶汽车使其沿基准直线前进,同时用转向盘修正角度测量器测量转向盘修正的角度,并根据计算得到的转向盘修正频度评价汽车的侧风稳定性。
2.6 转弯制动-开环试验方法
转弯制动-开环试验是测定制动对于重型汽车或汽车列车在道路保持性和方向性特性的影响的评价方法,这里主要参考ISO 14794-2003《重型商用车和客车-转弯制动-开环试验方法》。
3 结论
(1)现有车辆操稳标准的评价原理和方法对于不同车型,特别是单车与铰接车辆在结构和性能方面的差异没有制订不同的试验方法和评价指标,且20多年来没有随汽车技术进步而更新,因此,对于营运车辆稳定性检测,必须采纳新的研究成果,形成新的检测方法,建立营运车辆稳定性检测技术和方法的国家标准。
(2)对车辆操稳的评价多局限于线性车辆模型和简单的非线性模型(轮胎模型采用三次项模型),且仅局限于单车模型,没有专门针对铰接车辆进行系统分析。因此有必要建立更加完善的车辆系统模型,尤其是要将纵向速度作为车辆建模的重要考虑因素,并将两参数的相平面分析向多参数的相空间分析扩展,从整个系统的能量角度出发,综合分析多个评价指标,以达到完善评价指标体系的目的。
(3)现有汽车操纵稳定性评价指标限值还不能满足各种车型在不用试验条件下的稳定性评价需要。比如GB中没有提出转向阶跃输入试验的评价指标和指标限值。另外车型分类仅仅以最大质量作为划分标准,并不具体。因此在操纵稳定性评价指标限值方面还有待于更加深入和系统的理论和试验研究。
(4)基于传感器信息的状态估计检测方法是国内外广泛采用的车辆状态的检测技术,其优点是不需要测量所有的状态参数,而利用普通传感器能测量到的状态参数估计得到一些传感器很难测量到的参数,以达到节约成本、提高精度的目的,因此必须开展车辆速度、横摆角速度、车辆位置等信息的多源信息融合技术,从而满足相空间和能量分析等评价指标和评价方法的计算需要。