摘要:本设计提出的一种电子机械制动系统电机控制方法,该控制方法采用模糊控制器,以车轮实际滑移率S与系统设定最佳期望滑移率S0的误差E,以及误差E的变化率EC作为模糊控制器的参数,通过模期控制查表法,得到电机电流的变化量U。本设计的电机控制方法响应速度快,超调量小,可以提高电子机械制动系统对路面的适应能力。
0 引言
电子机械制动系统的制动力矩,是通过安装在4个轮胎上的制动机构产生,与传统的液压制动系统相比,可以简化制动系统结构、便于布置、装配和维修。而由于制动过程中车况多变及轮胎的非线性控制,需要对电子机械制动系统的电机提供-种响应速度快、超调量小且可以提高对各种路面的适应能力的控制算法。
1 总体设计
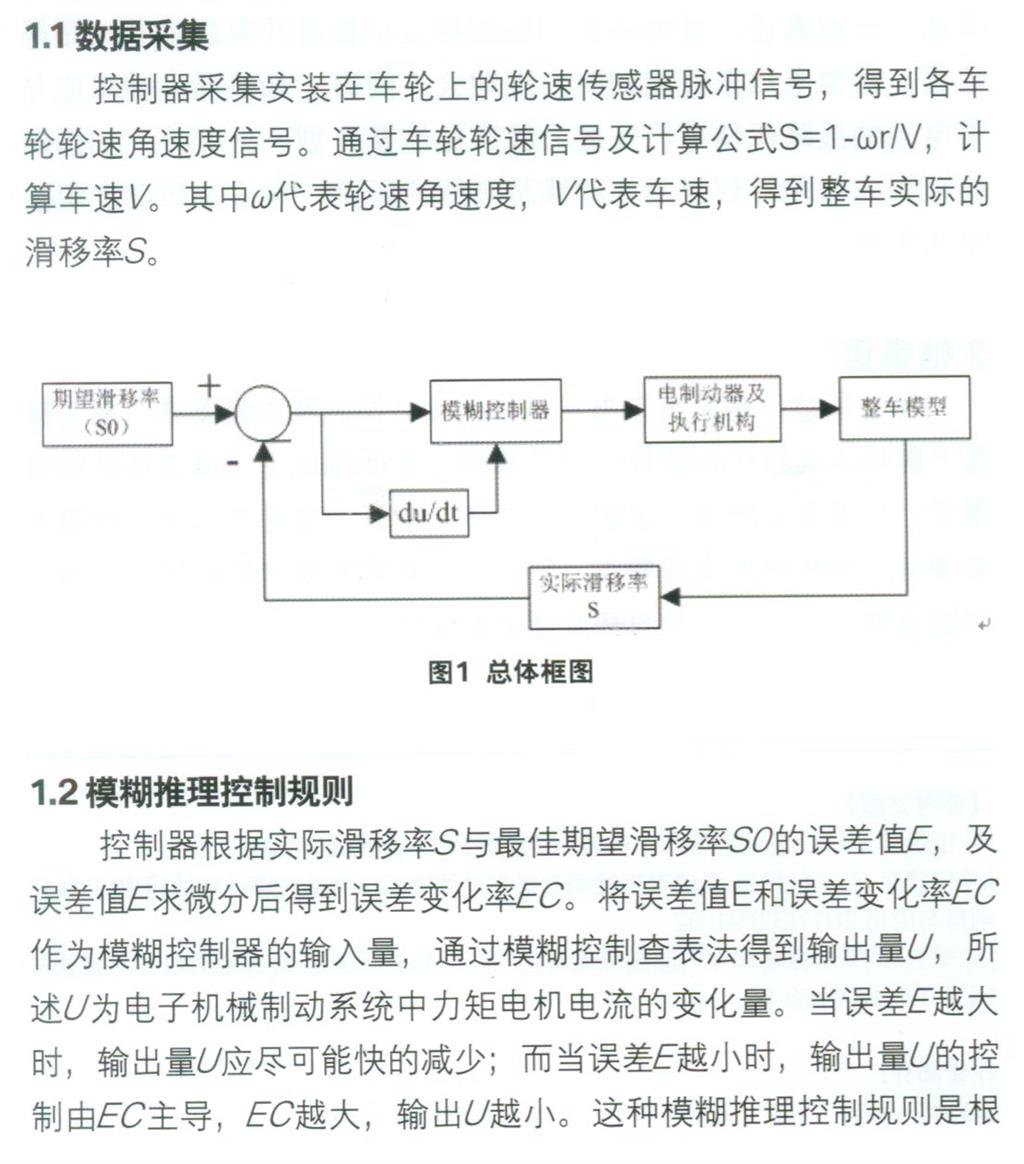
本设计所要解决的技术问题,在于提供一种电子机械制动系统的电机控制方法,其响应速度快、超调量小且可以提高电子机械制动系统对各种路面的适应能力。所以本设计的工作原理如图1所示,包括以下几个步骤。