ABS激活的前提是驾驶员踩制动引起车轮有抱死倾向,因此ABS在非制动工况下的稳定性控制就束手无策了。然而,生活中同样存在非制动失稳的工况,比如:
工况1:在冰面加速起步的时候无论油门踩多深都无法起步
工况2:在分离路面(一边轮胎在附着系数低的路面而另一边轮胎在附着系数高的路面)加速起步的时候无论油门踩多深都无法起步
对于工况1,其原因在于驱动力过大使得驱动轮打滑过量导致无法合理利用路面附着力。和制动相同,当轮胎端作用驱动力时,在轮胎与地面之间都会发生相对运动,车轮中滑动成分所占的比例称为滑转率(制动对应的通常称为“滑移率”),也用S表示。从下图可知,当滑转率控制在一定范围内时才能保证车轮与路面有良好的纵向附着系数和侧向附着系数,从而为车辆提供最佳驱动力。
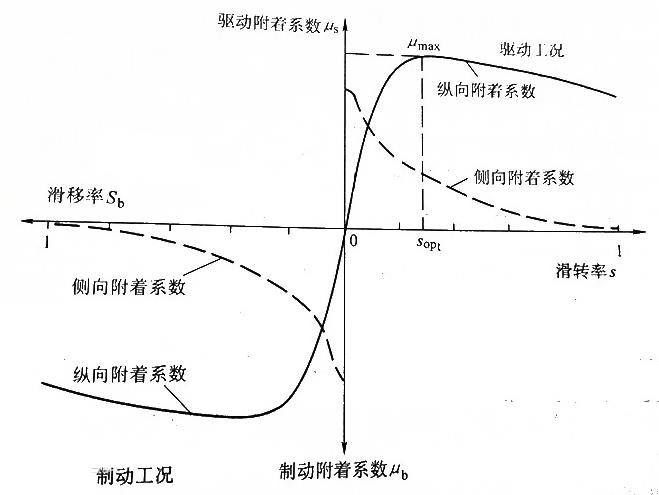 驱动工况下滑转率与驱动附着系数的关系
驱动工况下滑转率与驱动附着系数的关系
对于工况2,则是由于差速器的“副作用”造成的。汽车能够实现转弯依赖于差速器,转弯时车辆的左右侧车轮由于绕圆半径不同,其转速是不相等的,而如果左右侧车轮刚性连接则无法实现转速不相等。差速器是能够使左、右驱动轮实现以不同转速转动的机构。
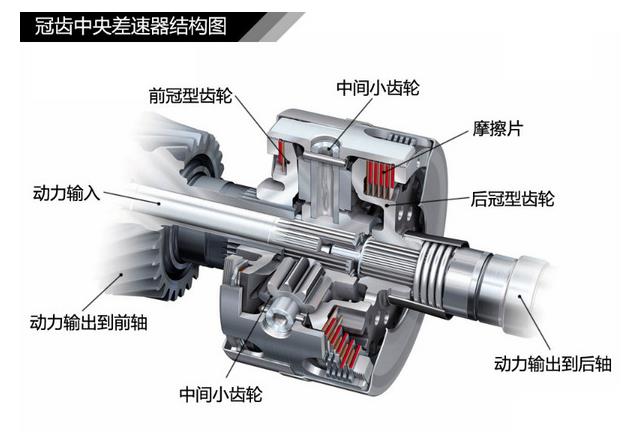
冠齿中央差速器,图片来自网络
差速器主要由左右半轴齿轮、两个行星齿轮及齿轮架组成,这一机构的特点是“差速不差扭”,即左右驱动轮的转速虽然不同,但是传递到两个驱动轮的驱动扭矩是相等的。
这样一来,当车辆在分离路面起步时,低附着路面的驱动轮率先达到附着极限,从而使整个驱动轴的驱动力受到低附着路面的影响,导致所传递到高附侧的驱动力矩受到限制(和低附侧路面驱动力矩相等),车辆因驱动力不足而无法起步。
为解决这两个典型工况的稳定性问题,各大主流汽车公司陆续展开了探索。1985年,Volvo 公司把一种称为ETC(Electric Traction Control)的电子牵引力控制系统安装在Volvo 760 Turbo 汽车上,是世界上首次牵引力控制系统在实车上的应用。1986 年,通用汽车公司雪佛兰(Chevrolet)分部在克尔维特•英迪牌轿车上安装了牵引力控制系统。1986 年9 月,奔驰公司与威伯科(WABCO)公司联合开发出应用于货车的TCS系统。1986 年12 月,博世(Bosch)公司首次推出了具有制动防抱和驱动防滑功能的TCS——Bosch ABS/ASR 2U,应用并将制动防抱死系统和牵引力控制系统集成到一起并应用于梅塞德斯S级轿车上,并开始小批量生产,这标志着 ABS/TCS集成时代的来临。
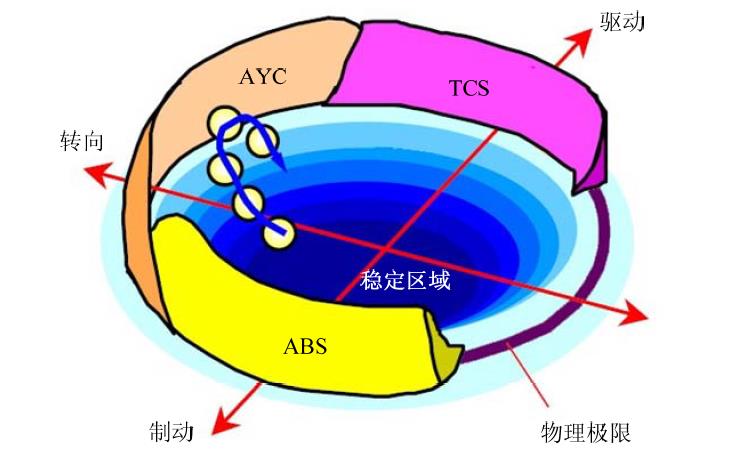 ABS:抑制过度制动;TCS: 抑制过度驱动
ABS:抑制过度制动;TCS: 抑制过度驱动
图片来自网络
TCS(Traction Control System)控制系统是在ABS的基础上发展而来,后者在过度制动时起作用,前者在过度驱动时起作用。由于TCS不仅可以调整制动压力,也可以调节发动机或者驱动电机的驱动力,因此TCS的组成部分相对ABS要更多,除了执行机构增加了驱动力控制单元(发动机ECU或电机ECU)外,还增加了方向盘转角传感器和惯性传感器。
① 液压控制单元
② 轮速传感器
③ 方向盘转角传感器
④ 惯性传感器 (横摆角速度,纵向加速度,横向加速度)
⑤ 驱动力控制单元(通过CAN交互)
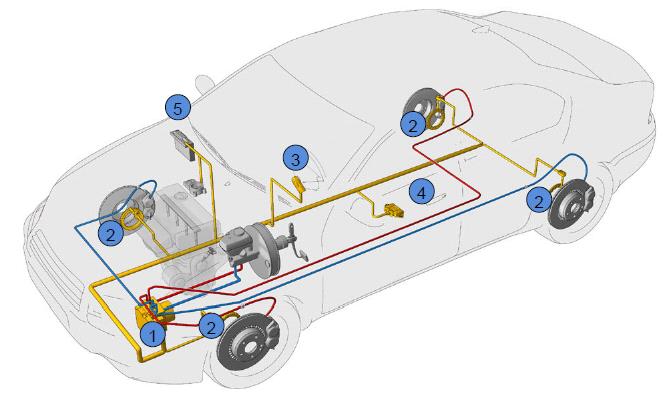 TCS控制系统的关键组成部分
TCS控制系统的关键组成部分
TCS通过发动机或者驱动电机的输出扭矩和轮缸压力的协调控制,调节驱动轮的滑转率,从而改善轮胎和路面间的附着特性,提高车辆的动力性和稳定性。目前主流的TCS系统控制架构如下图所示。TCS 控制器主要包括三个部分:
-道路状况识别
-驱动扭矩控制
-压力控制
其中,道路状况识别模块主要包括附着识别和纵坡识别,根据车辆状态参量,识别出附着和纵坡,给扭矩控制和压力控制提供数据支持。驱动扭矩控制模块包括PID的扭矩控制和模糊逻辑扭矩控制两部分,其输入参量为车辆状态以及道路状况识别模块识别的路面附着和坡度,其输出参量为目标扭矩以及降扭不足部分。压力控制模块的输入为车辆状态、道路状况、以及扭矩控制模块输出的降扭不足部分。压力控制模块包括上层压力控制和底层压力控制,上层压力控制给出目标压力,底层压力控制负责目标压力的实现。
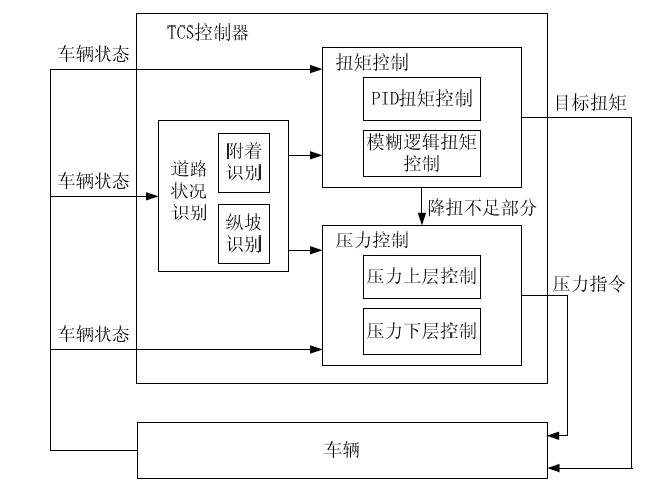
TCS控制系统架构
TCS对执行器的控制可以按照这两个典型的工况分类:
对于工况1,当两个驱动轮的附着系数近似相同时,TCS仅控制驱动力,其闭环控制可以概括如下:
◆驾驶员踩油门制动,建立驱动力
◆传感器向TCS ECU提供轮速、坡度等信息,ECU计算滑转率,如果超过设定的稳定门限,TCS介入对驱动力进行干预,降低驱动力并将目标发给驱动力控制系统ECU
◆驱动力控制系统ECU响应目标驱动力,使驱动轮的打滑量在稳定区间内,保证车辆能有效地利用路面的附着力
在工况1下典型的TCS实车控制数据如下图1-10s所示。从图(c)可以看出,TCS对发动机扭矩进行了限制,从图(b) 可以看出,车辆在冰面起步时保持了较好的加速性能,车速基本没有波动。
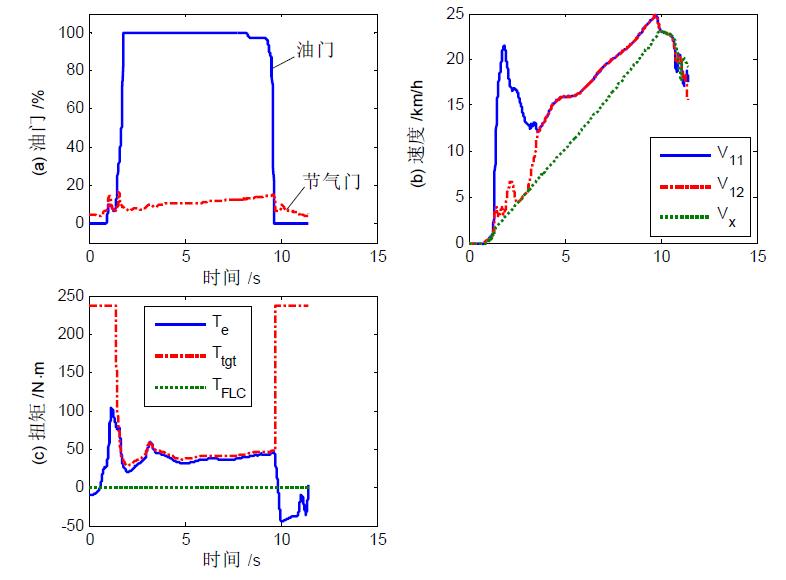 冰面TCS起步典型数据
冰面TCS起步典型数据
图片来自清华大学博士论文,作者李红志
对于工况2,当两侧驱动轮附着系数差异较大时,由于整个驱动轴能提供的最大驱动力受到低附侧的附着系数的限制,使得TCS对驱动力的控制范围也受到了限制,导致无法将打滑量调到稳定性区间。这种情况下TCS在控制驱动力的同时要对低附侧的车轮施加制动力,这样一来,由于制动力的抵消,即使驱动轴上的驱动力超过了低附侧的附着极限,但实际作用在低附侧的驱动力变小而不至于达到附着极限,从而扩大了TCS对高附侧车轮的驱动力控制范围,实现有效利用路面的附着力起步。
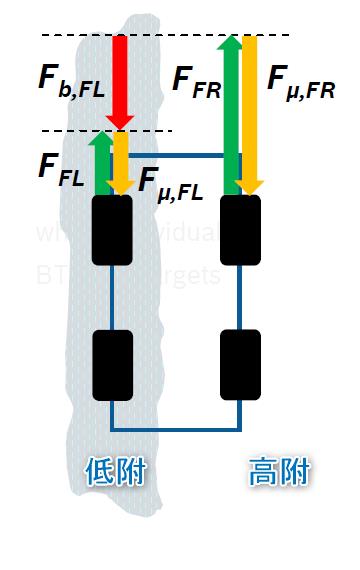
红:制动力;绿:驱动力;
黄:路面能提供的最大附着力
在工况2下典型的TCS实车控制数据如下图2-10s所示。从图(b) 可以看出,在分离路面起步时,低附侧轮速保持一定的滑转,高附侧基本不滑转,且加速性能较好,车速基本没有波动,表明对开路面上起步的动力性较好,且比较平顺。从图(c)可以看出,TCS对发动机扭矩进行了限制。从图(d)可以看出,在加速阶段,只有低附侧车轮上有压力,且保持了持续的压力,这样一来才能让高附侧的附着较好地被利用。
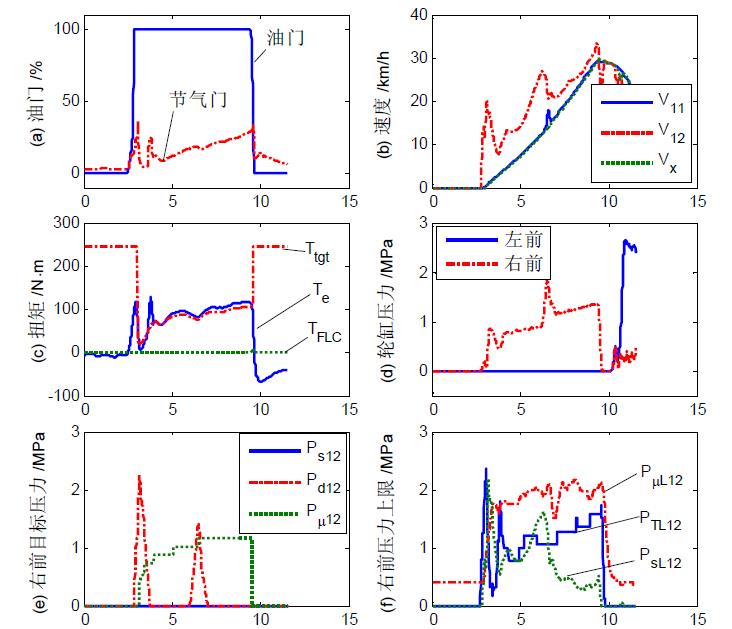 分离路面TCS起步典型数据
分离路面TCS起步典型数据
图片来自清华大学博士论文,作者李红志

